Записи с меткой «шагоходы»
Шагоходы
Чтобы лучше понять, что в истории развития техники имеются «странности» и загадки рассмотрим процесс развития шагающих машин. Шагоходы – это разнообразные машины, передвигающиеся при помощи сгибающихся или вращающихся на шарнире опорных конструкций (ног), методом их синхронизированной поступательной перестановки. Это напоминает шаг человека или животного. Машины на «шагающем» ходу могут иметь гидравлический, механический, электрический, пневматический привод или их комбинации — электромеханическими, гидромеханическими и т. д.
Человек изобрёл «волокуши», затем – колесо. А до этого природа «изобрёл» ноги. Возможно, человек, передвигаясь на ногах, задумывался о возможности смастерить что-либо подобное. Для него были очевидны преимущества ног. Великолепная проходимость – это первейшее и наиглавнейшее преимущество ног, как средства передвижения. Передвижение при помощи ног может обойтись без гладких дорог, колеи, рельс, желобов. В теории всё просто, а на практике, человек очень долго их изобретал.
Возможно этому помешало то, что колёсные, гусеничные, рельсовые, канатно-тросовые, магнитно-левитационные и другие способы передвижения дешевле, надёжнее, проще в эксплуатации.
Кроме того, шагающие машины мало распространены из-за конструктивной сложности исполнения, отсутствия целевого предназначения, и как следствие, отсутствия сферы практического применения. Из используемых на практике механизмов можно назвать шагающие экскаваторы.

Ещё препятствует их внедрению в промышленность, в качестве военной техники – это высокие энергозатраты. Они возрастают по мере увеличения массы машины, длины шагающих «конечностей», амплитуды шага.
Большой проблемой являются вестибулярные нагрузки на человека, оператора машины из-за плохой устойчивости положения кабины водителя в «двуногих» и «четвероногих» моделях. Поэтому создаются машины, исключающие нахождение человека в них и управляемые дистанционно или бортовым компьютером с заложенным алгоритмом действий.

Шагоходы весьма популярны в научной фантастике, как возможные примеры наземной техники (в том числе боевой). Однако, в современном мире отсутствуют шагающие гигантские боевые машины, подобные описанным в книгах серии BattleTech. Это связано с тем, что шагоход имеет плохую устойчивость, может «запутаться в собственных ногах». Двуногий робот может быть подбит в ногу и потерять мобильность. У шагающей машины отсутствует возможность нести много брони, так как её придётся распределить тонким слоем по всему корпусу и «конечностям». В результате, даже самого бронированного робота можно будет легко пробить. Нужна легкая, двуногая, с отличным гироскопом и хорошо обученной нейросетью, машина.
Проблемами в создании шагоходов являются соотношение цены и эффективности, малой маршевой скорости движения, отсутствие достаточно энергоёмких и компактных источников энергоустановки и быстродействующих приводов для ходовых ног.
Создателем первого шагохода можно считать русского учёного П. Л. Чебышёва, который в 1860-х — 1870-х годах ставил эксперименты с шагающими механизмами различной конфигурации.
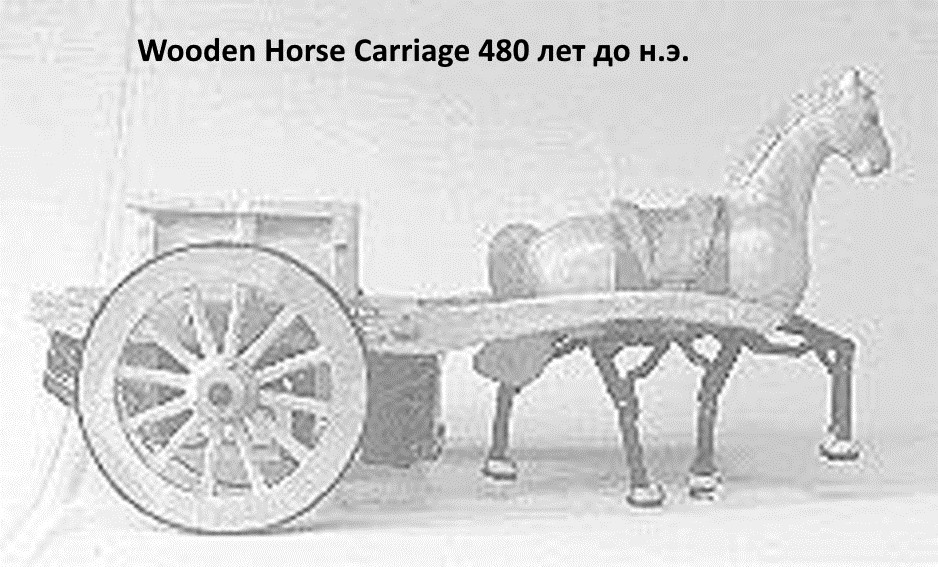
Первым упоминанием о фигурке с движущимися механическими ногами можно считать модель лошади, изготовленную 480 лет до н.э. китайским механиком Lu Ban, известную как «Wooden Horse Carriage». Позже её повторил китаец Lu Pan. Немного позднее, модель коровы изготовил Chu-Ko Liang 230 лет до н.э. «Wooden Oxen and Gliding Horse». Я уже писал, что история Китая начинается с 19 века, когда её начали писать иезуиты.

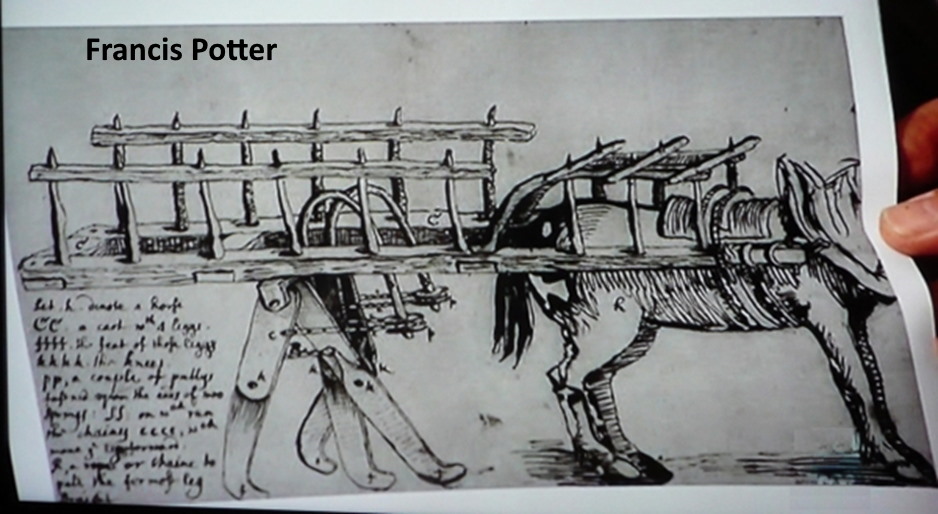
Francis Potter изобрёл модель шагающей лошади. Этот чертёж нашёл Роберт Гук на чердаке старого дома, а затем представил на заседании Королевского общества, где он работал секретарём(1677–1682).
В 1770 году Richard Lovell Edgeworth Англо-ирландский политик-писатель, инженер изобрёл 8-ногую Walking Wooden Horse, изображения которой отсутствуют. В 1909 году, аналогичную конструкцию предложил британец Charles Guest Norris. Это была платформа с оборудованием и двигателем. Под ней были закреплены две рамки, способные поочерёдно сдвигаться, продвигая платформу. Предполагалось использовать эту конструкцию для передвижения буровых платформ и шагающих экскаваторов.
В 1850 году, русский математик Пафнутий Чебышёв рассчитывает и изготавливает шагающую платформу. В последствии, платформу изготовили из современных материалов и ещё раз доказали полную работоспособность идеи шагающей платформы Чебышёва.

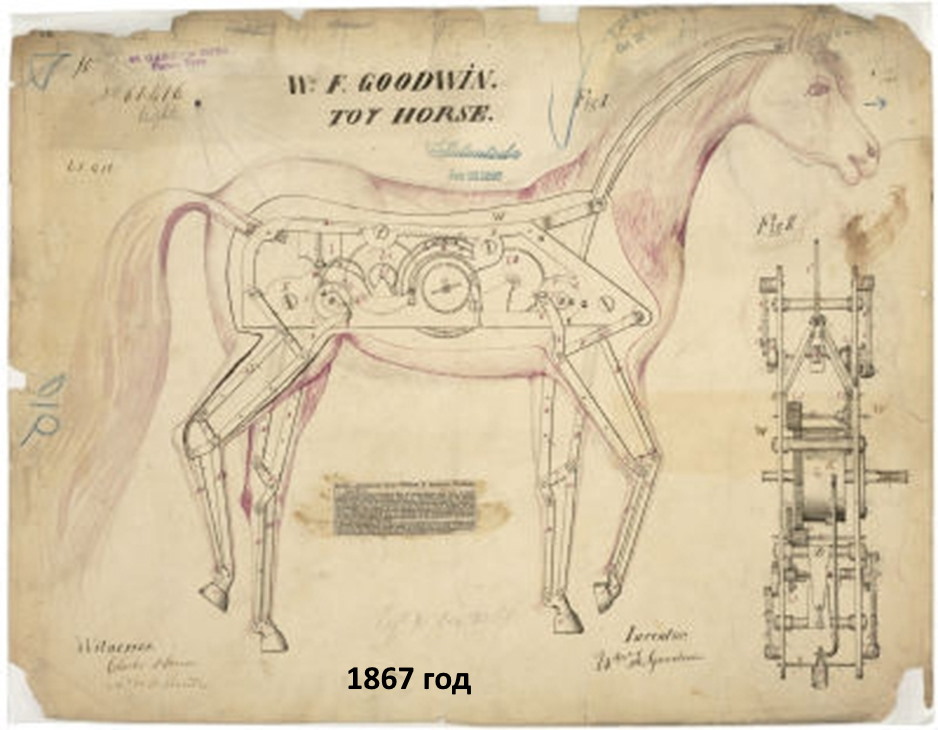
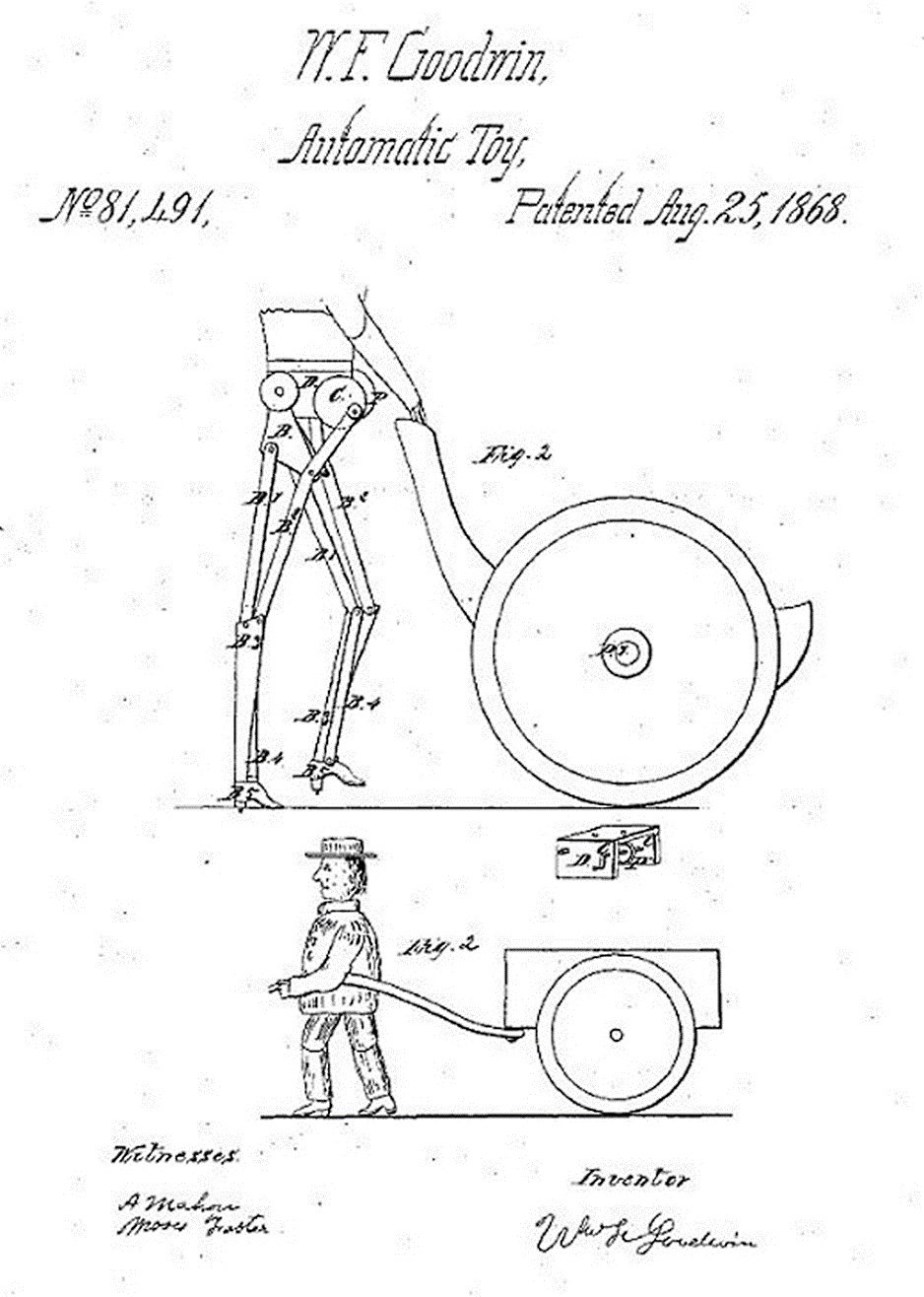
В 1867 году американец W. Farr Goodwin предлагает свой патент на Mechanical Horse. Ещё он запатентовал механические игрушки с аналогичным типом движения, по его чертежам даже выпустили партию движущихся игрушек.
В 1800 году был создан Исааком Грассом (Isaac Grass) «Zadoc P. Dederick». Имел паросиловую установку. Предназначался для передвижения повозки.
Появление подобного экипажа на публике породило массу статей, слухов и продолжилось в многочисленных публикациях в газетах и фантастических романах.

С 1869 по 1875 годы было разработано множество моделей «Steam King». Например, Thomas J. Winans, E. R. Morrison, Capt Rowe, Adam Ironsides. По этой схеме (упрощённой), «ходят» большинство современных механических игрушек.
В 1875 году W.W. Cole’s Circus со своим «Steam Man» гастролировал по Америке. Данная модель Стим-мена продавалась за 7000 $, сумасшедшая сумма по тем временам. Имелось три разновидности «Стим-менов», которые отличались двигателями (уголь, нефть, бензин), а также, размерами. Они породили массу литературных персонажей и «фейков», в виде фотомонтажа и проработанных стим-легенд.
Было множество «реально существовавших» механических существ, порождённых писательской фантазией. Например, Electric Man, The Steam House, Steel Giant, Walking by Steam, Hockbockid, Walking Mechanical Ostrich, Electric Bob’s Big Black Ostrich и другие.

В 1880 году было изготовлено три экземпляра Steam Man «Frankenstein», которые выставлялись в Сиднее и Мельбурне. На выставке побывало свыше 1,5 млн. человек, при том, что население тогдашнего Мельбурна составляло 280 000 человек.
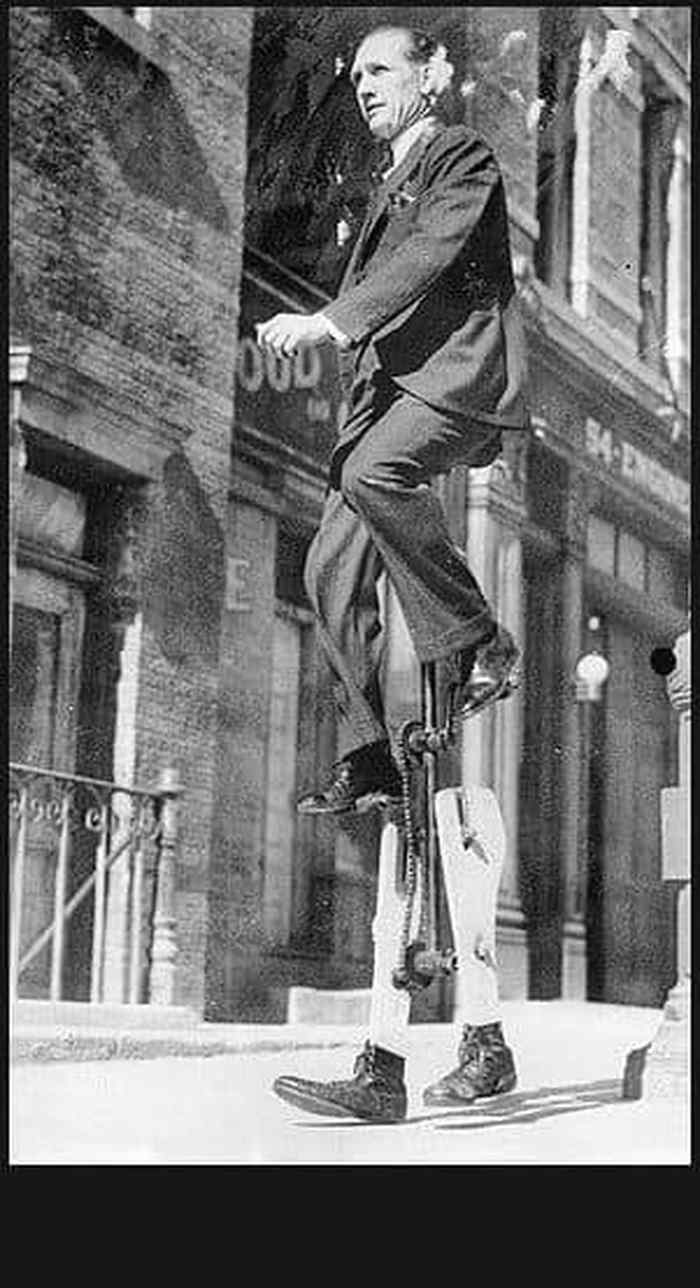
В 1890 году George R. изготовил Electric Walking Machine. Автоматон имел своей целью благородное занятие – помощь инвалидам в передвижении на коляске по улицам города. Наблюдатели отмечали изящество и натуралистичность его походки.
В 1891году Woolson Morse построил для комической оперы Mechanical Elephant (механического слона). С 1894 по 1914 годы было построено множество работоспособных моделей Mechanical Horse различного размера и способа постановки (перед- и за телегой). В том числе и конь педальный. Они с большим успехом демонстрировались перед публикой и журналистами.
В 1904 году был разработан Mechanical Walker Human Powered Unicycle. Сведения о постройке – отсутствуют. Выглядит красиво, сидишь, крутишь педали и идёшь.

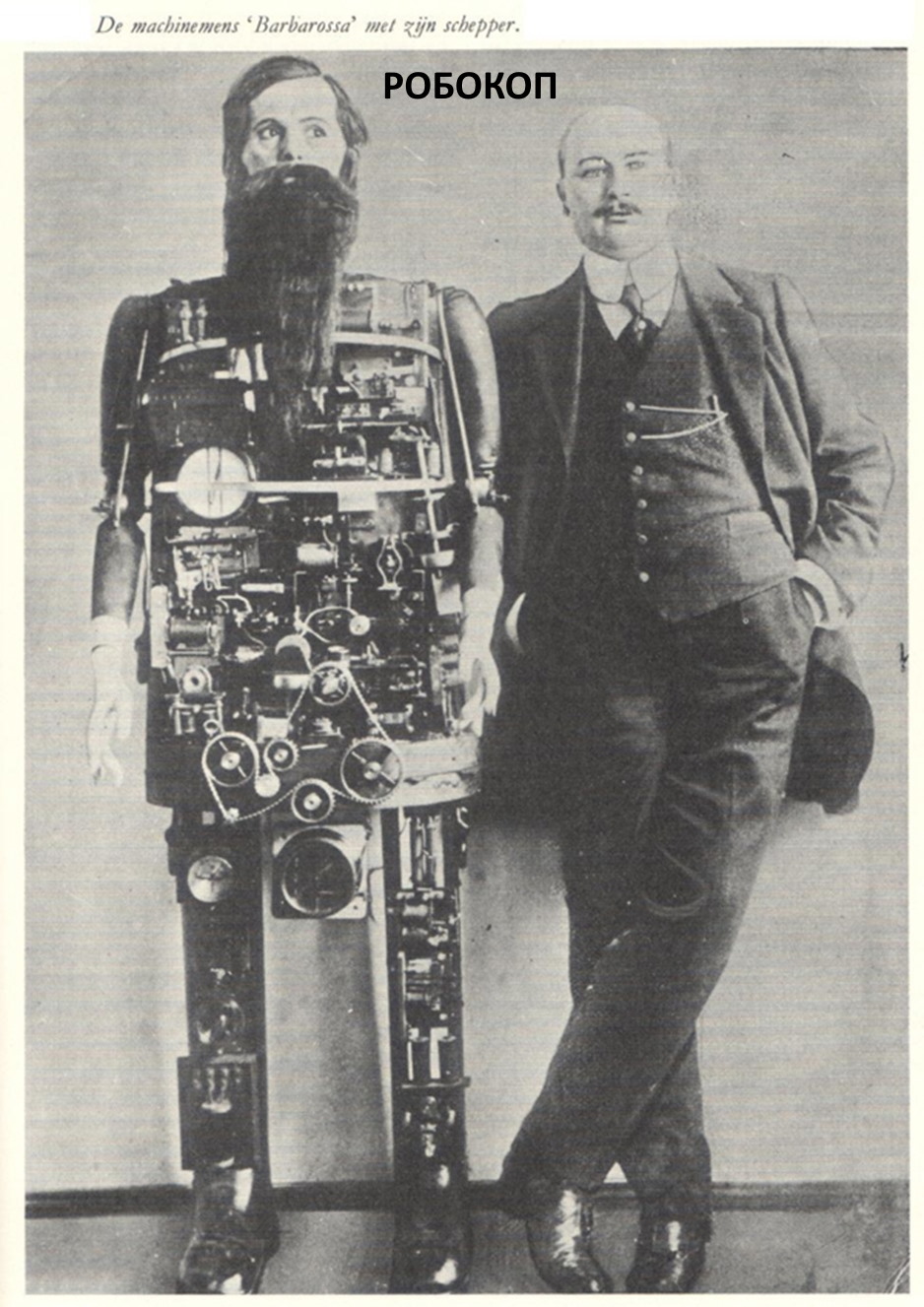
В 1909 году создан Occultus / Barbarossa – Whitman. Он был восторженно принят публикой. Журналисты считали, что наконец изготовлен полный аналог человека, способный выполнять все его функции. Поступило предложение использовать робота в качестве полисмена (в частности, для разгона толпы с использованием «нетравматичного» оружия).
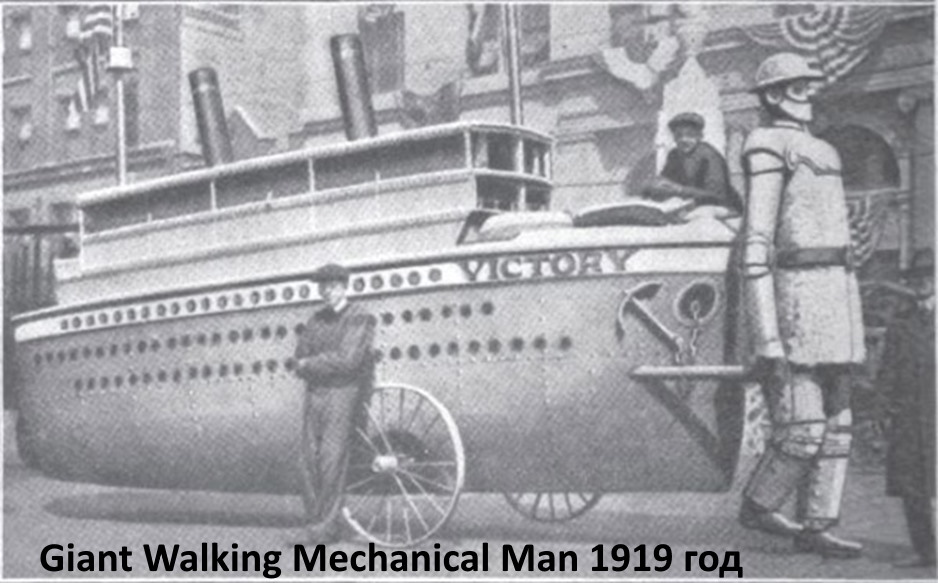
В 1919 году был создан Giant Walking Mechanical Man, который весил тонну. Изобретатель уверял, что потратил на его постройку 6 лет и 15000 $. Приводился в движение 20-сильным мотором. Использовался на парадах.
1913 год – американская компания Monighan Machine Co. построила первый шагающий экскаватор на основе разработки инженера Остина Мартинсона.
1940 год – спроектирована, построена и испытана W. H. Allen & Company Ltd в Лондоне, по заказу Военного министерства Великобритании в лабораторных условиях модель, шагающая на 4-х конечностях.
1961 год – построена, шагающая на 8-и конечностях модель Iron Mule Train («железный мул»).
1969 год – построен драглайн (экскаватор) Big Muskie для добычи породы в открытых горных выработках. Это самая большая шагающая машина в мировой истории (собственный вес — 13,5 тыс. тонн, объём ковша — 170 м³ или 295 тонн породы).
1971 год – построен Институтом океанологии АН СССР телеуправляемый от ЭВМ подводный робот «Манта».
1977 год – построен в лабораториях Университета штата Огайо в Колумбусе первый шагоход с автономным управлением на 6-ти конечностях Hexapod.
1987 год – демонстрация манёвренных возможностей Adaptive Suspension Vehicle (ASV) признанного учёной общественностью лучшим роботом-шагоходом современности.
1989 год – построен в лаборатории Массачусетского технологического института шагоход с переменным темпом и способом хода (шагом, рысью и др. способами).
1991 год – построен в лабораториях МИТ и прошёл первые испытания прыгучий робот-кенгуру на 3-х конечностях (две «лапы» и «хвост»).
1993 год – изготовленные в лабораториях МИТ робот-кенгуру на 3-х конечностях и двуногий «байпед» на 2-х конечностях «снимаются» в кино в эпизодической роли (остросюжетный голливудский боевик «Восходящее солнце»).
1993 год – изготовленный в лабораториях МИТ робот-таракан на 6-ти конечностях имитирует движения настоящего таракана, успешно передвигается по лаборатории.
В настоящий момент шагоходы (также часто называемые «ме́хи») разрабатываются американской фирмой «Mechanized Propulsion Systems». Представители фирмы обещают создать образец, пригодный для боевого применения, к 2025 году.
Краткое изложение статьи «Ни колесо, ни гусеница. Средства передвижения» блогера steampunker.